FREDZIO
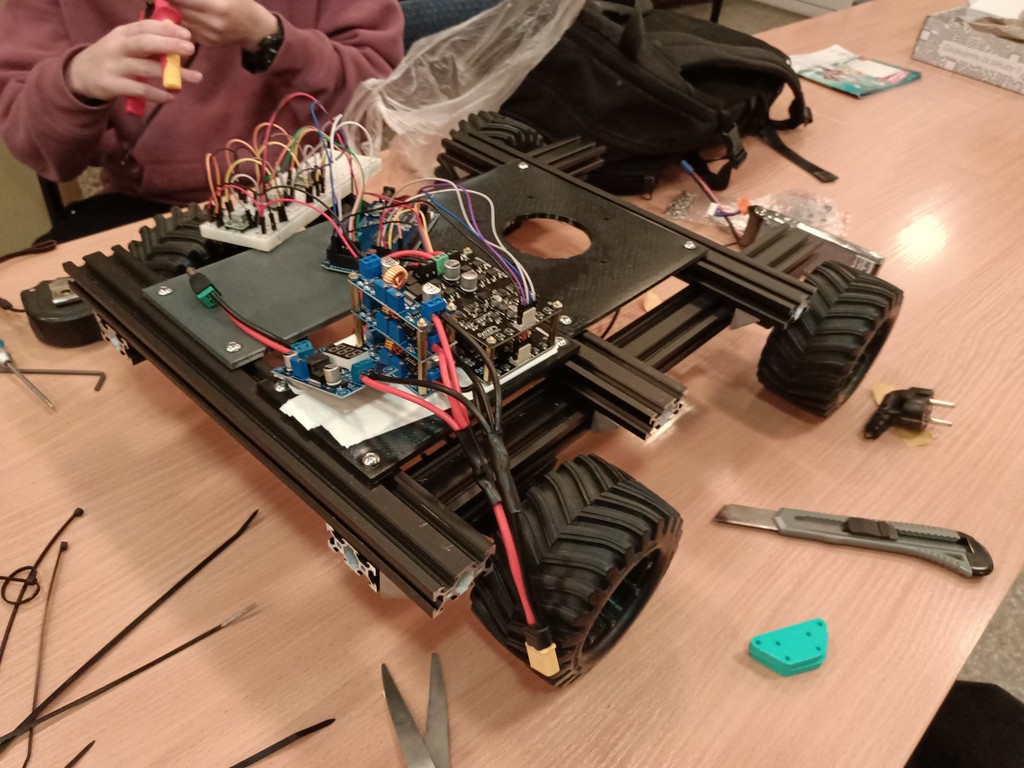
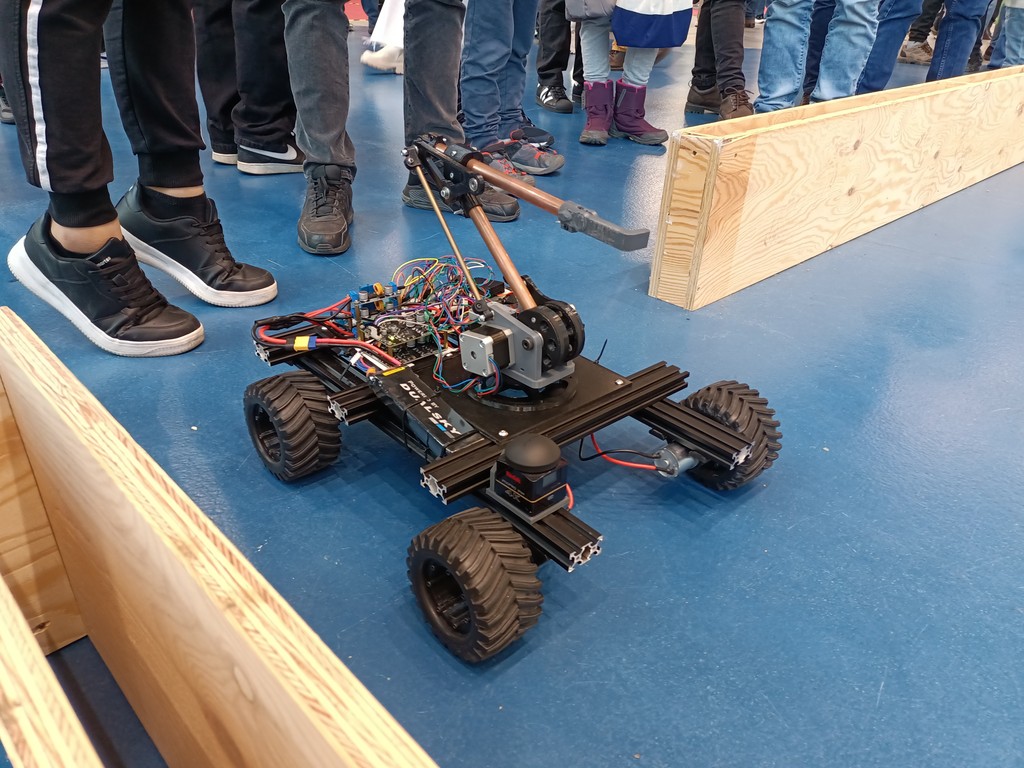
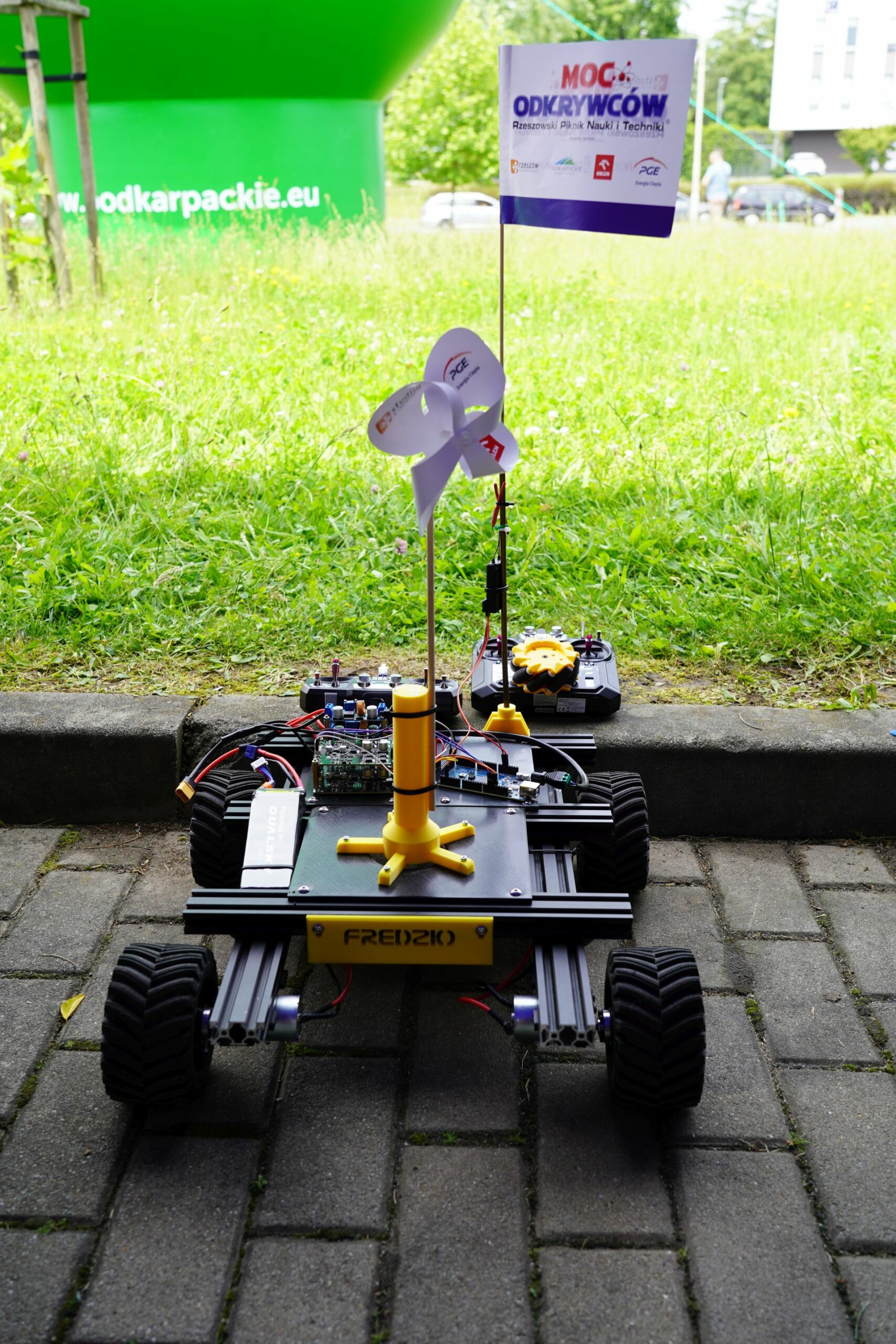
Our debut design—a mobile, remote-controlled robot built from lightweight yet durable aluminum profiles and powered by four independent motors—premiered at the national X-Challenge 2024 competition in the Task Hunters category. This prestigious event annually attracts dozens of teams from across the country to compete in the design and programming of autonomous and semi-autonomous machines that perform complex tasks in a specially prepared arena.
Although our robot was being built at breakneck speed, on a very limited budget, and in less than ideal conditions, we decided to take on the challenge. The build was full of surprises – from minor electrical short circuits, to a major breakdown on competition day, to a spectacular rollover during a test run and a broken arm during one of the competitions.
Despite these adversities, our design not only took off but also took 10th place out of dozens of teams from across Poland, which we consider a huge success. This competition was not only a test of our skills but also an invaluable lesson in cooperation, improvisation, and stress resistance. We're already working on the next, even better version of the robot!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
RAGNAR
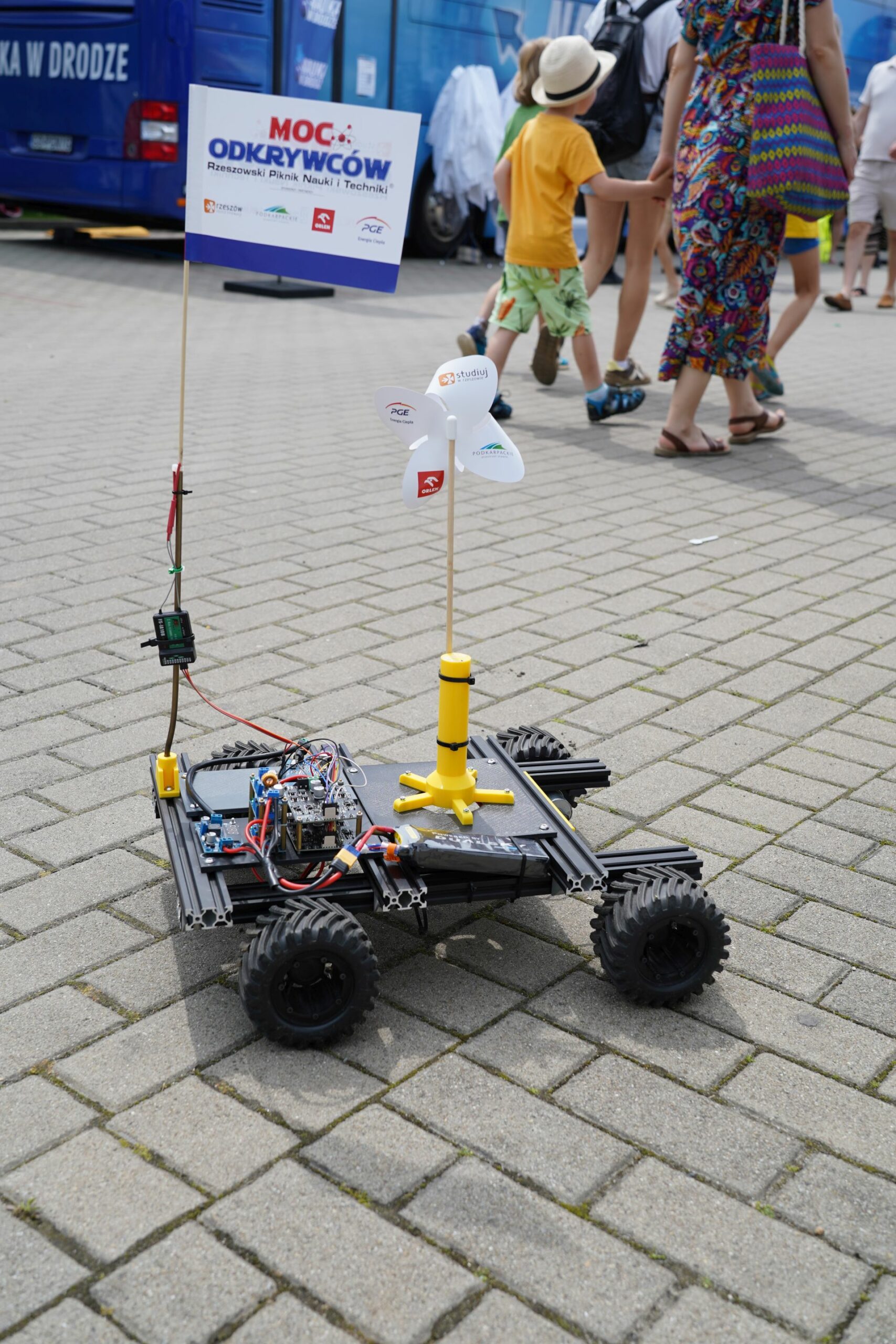
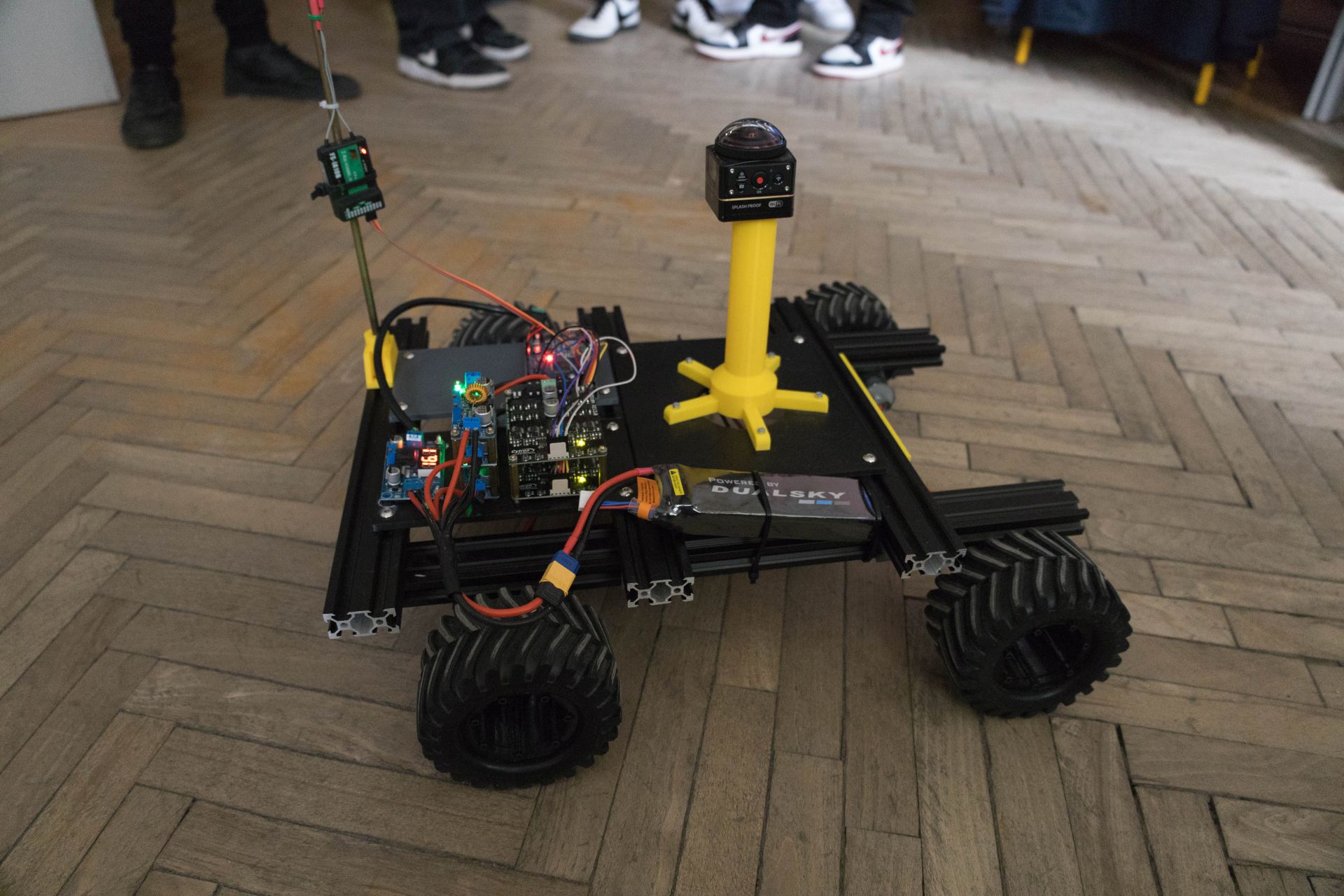
This unique robot was created thanks to cooperation with the Podkarpackie Innovation Incubator (PCI), which not only provided substantive support but also provided funding to enable the project's implementation. This was a huge step forward for us – we were finally able to translate our ideas and prototypes into a real, fully functional design.
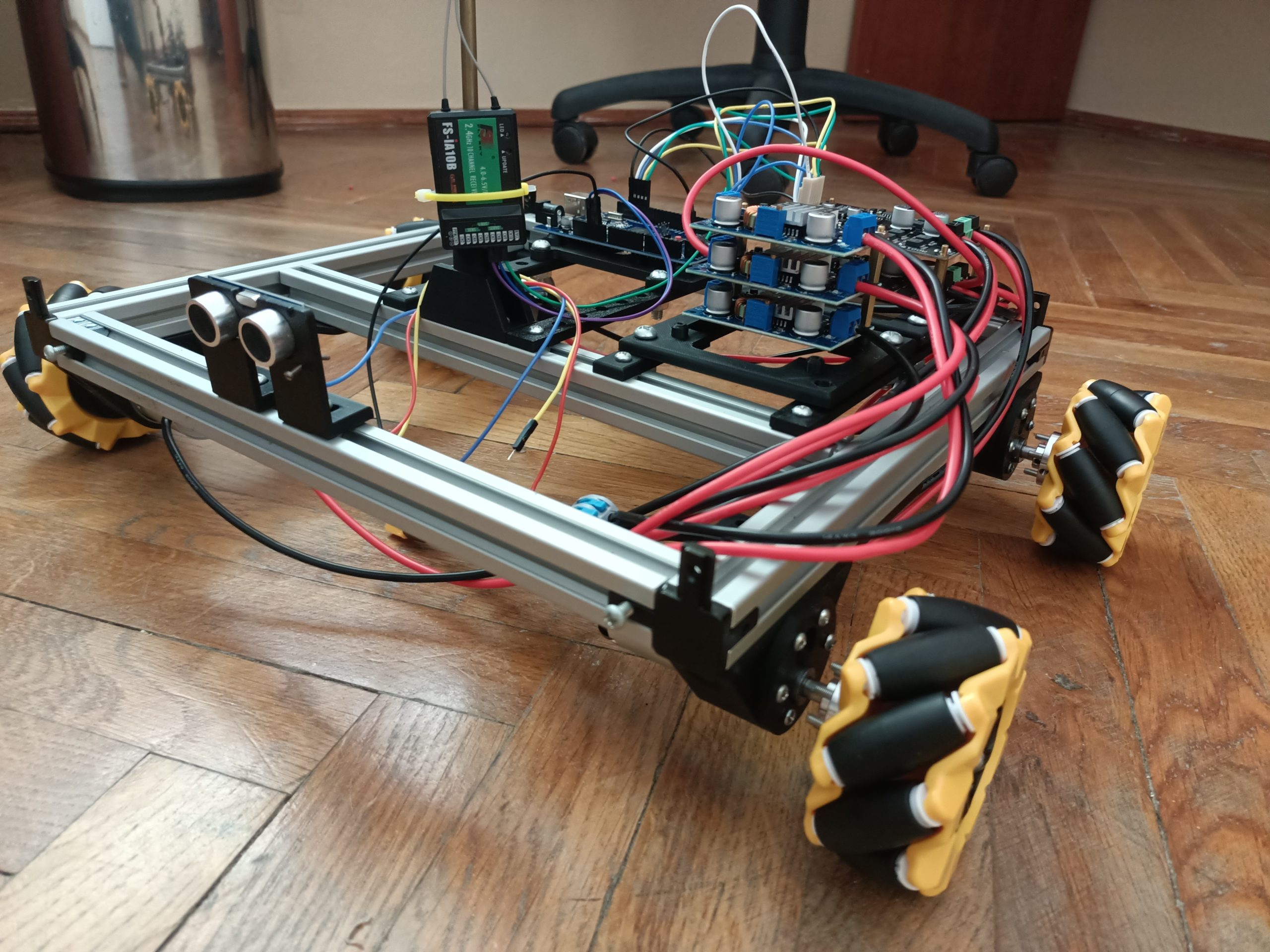
In terms of construction, the robot is based on a solid and lightweight frame made of aluminum profiles, which ensures both durability and flexibility for future expansion. It is powered by four independent motors, each of which controls a separate omniwheel – these are what make this design unique.
The use of omniwheels allows the robot complete freedom of movement: it can move not only in the classic forward and backward direction, but also sideways, diagonally, and even rotate around its own axis. Furthermore, thanks to an appropriate control algorithm, it is possible to shift the robot's axis of rotation beyond its physical base by up to 30 cm. This means that the machine can, for example, precisely circle an object in front of it without having to change the orientation of the entire structure.
Like our previous project – Fredzio – this robot can be controlled remotely, but here we've gone a step further. Thanks to the use of additional sensors, partial autonomy is also possible. We've equipped it with an ultrasonic distance sensor and a laser rangefinder, which allows it to detect obstacles even within a radius of up to 12 meters. Combined with a simple but effective obstacle avoidance algorithm, the robot can independently analyze its surroundings and make decisions, such as changing direction.
Of course, as is often the case with engineering projects, it wasn't without its challenges. During testing, we had to contend with, among other things, cracking mechanical components—particularly those connecting the wheels to the motor shafts, which were susceptible to damage from dynamic stress. Integrating the laser rangefinder with the robot's logic circuits posed an additional challenge, as this required matching signal voltages and ensuring stable communication between various electronic components.
Despite the challenges we encountered, this project was a fascinating experience and another step towards building more advanced, mobile robots. Thanks to PCI's support, we were able not only to develop our technical skills but also to realize a concept that until recently existed only on paper.
{kind=link}
{kind=link}
Autonomous Robot
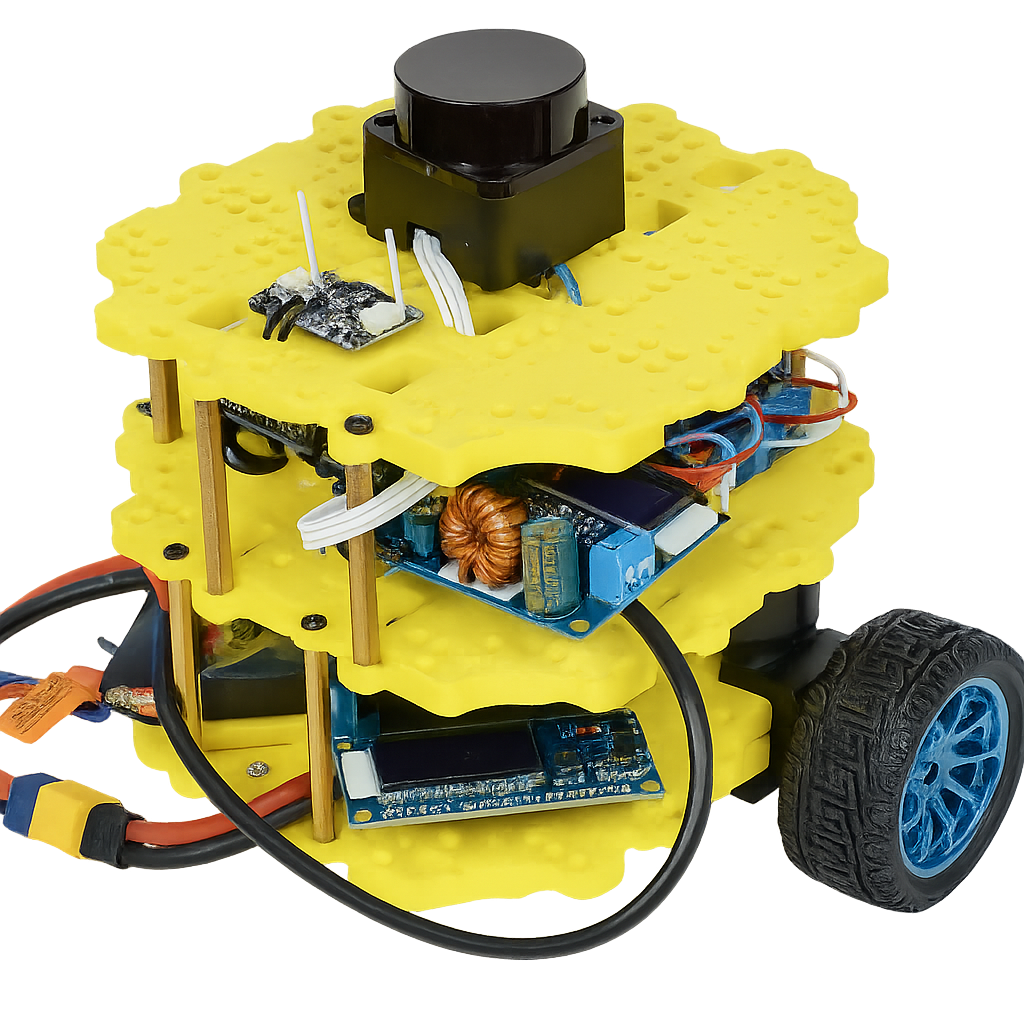
While at first glance this small robot may resemble a child's toy, its interior conceals surprisingly advanced technology. This is the result of our work as part of the "Naukolatek" competition and the "Application of Artificial Intelligence in Robot Navigation" research project, the goal of which was to create a robot capable of autonomously navigating in unfamiliar environments using modern localization and route planning algorithms.
Beneath this unassuming exterior lies a comprehensive set of thoughtful hardware and software solutions. We've equipped the robot with, among other things, encoders, a position sensor, and LIDAR – a system that allows for precise scanning of the environment using laser light. On the software side, we decided to use ROS2 (Robot Operating System 2) – an open-source framework commonly used in mobile robotics research.
By combining data from LIDAR and encoders, it was possible to implement SLAM (Simultaneous Localization and Mapping) technology, which allows the robot to simultaneously map its surroundings and determine its own position in space. As a result, the robot can autonomously navigate unfamiliar terrain, detect and avoid obstacles, and plan a route to a given point using the A* algorithm.
Of course, it wasn't without its challenges. One of the most difficult stages proved to be the integration of the LIDAR with the ROS2 system—it required not only the correct driver selection but also calibration of the sensor relative to the robot's axes and data synchronization with other sensors. Configuring the NAV2 package, responsible for navigation, proved equally time-consuming. We had to carefully select the parameters for localization, motion planning, and map management to ensure the robot's behavior was stable and predictable, regardless of track conditions.
Due to limited computing resources on the robot itself, some demanding operations—such as map generation, route calculation, and localization—were transferred to an external desktop computer, which communicated with the robot via a Wi-Fi network. The ROS2 architecture enabled seamless data exchange between devices in real time, significantly increasing the system's efficiency.
Although we didn't win the competition's top prize, the knowledge and experience we gained were invaluable. We learned the ins and outs of autonomous systems, integrated hardware with software, and tackled real-world challenges encountered in working with modern robotics. We will certainly return to this project with new ideas and even greater enthusiasm.
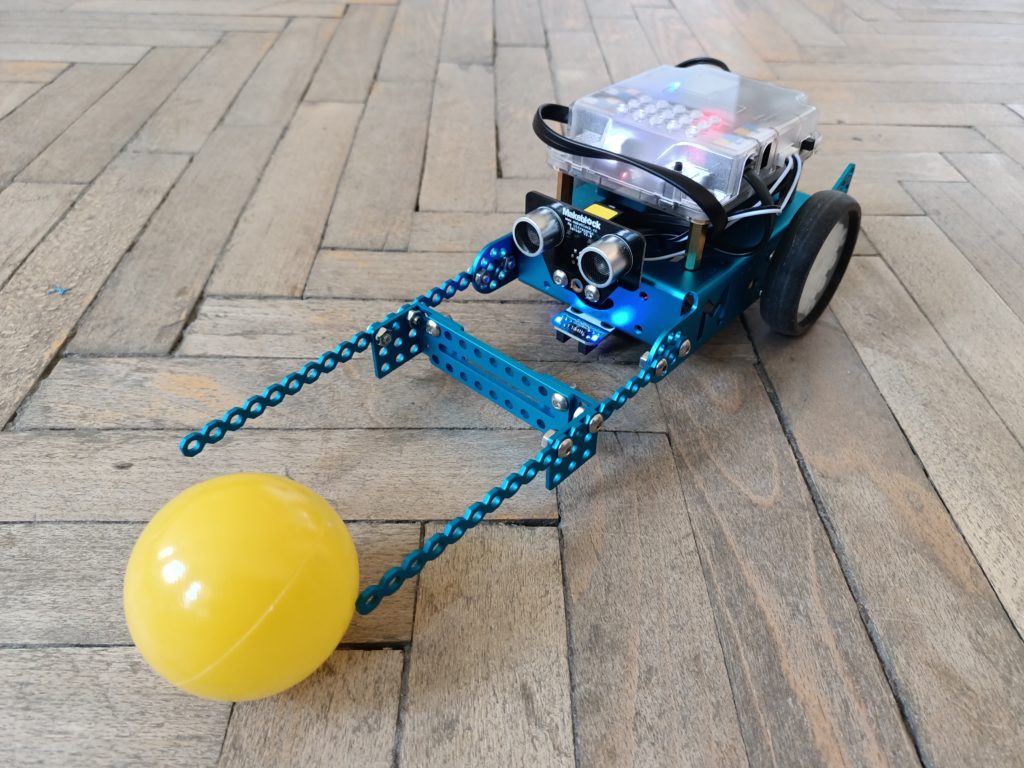
mBot Robots - Our Learning Robots
In our lab, alongside more advanced designs, we also have compact yet incredibly useful mBot robots. Thanks to the dedication of our advisor, dr Stanisław Topolewicz, who participated in the nationwide IT Mastery Center project, the school received three such devices as part of its IT club. Although seemingly simple, the mBots became an ideal testing environment for us.
We use them as a platform for learning and experimentation—they're where we test our first control algorithms and learn the basics of electronics and programming. We simulate various scenarios—from sumo robots, to line-following vehicles, to obstacle-avoidance structures. They allow us to safely make mistakes, refine ideas, and develop skills before transferring them to our own, more complex robots. This is our first step toward large-scale projects.