FREDZIO
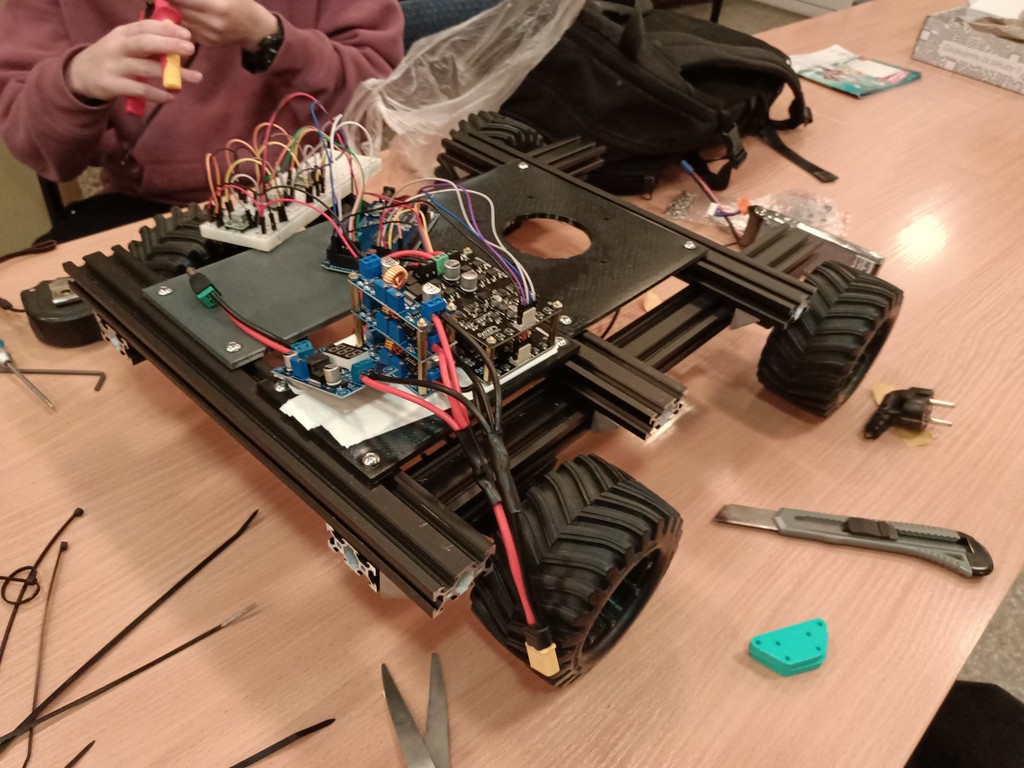
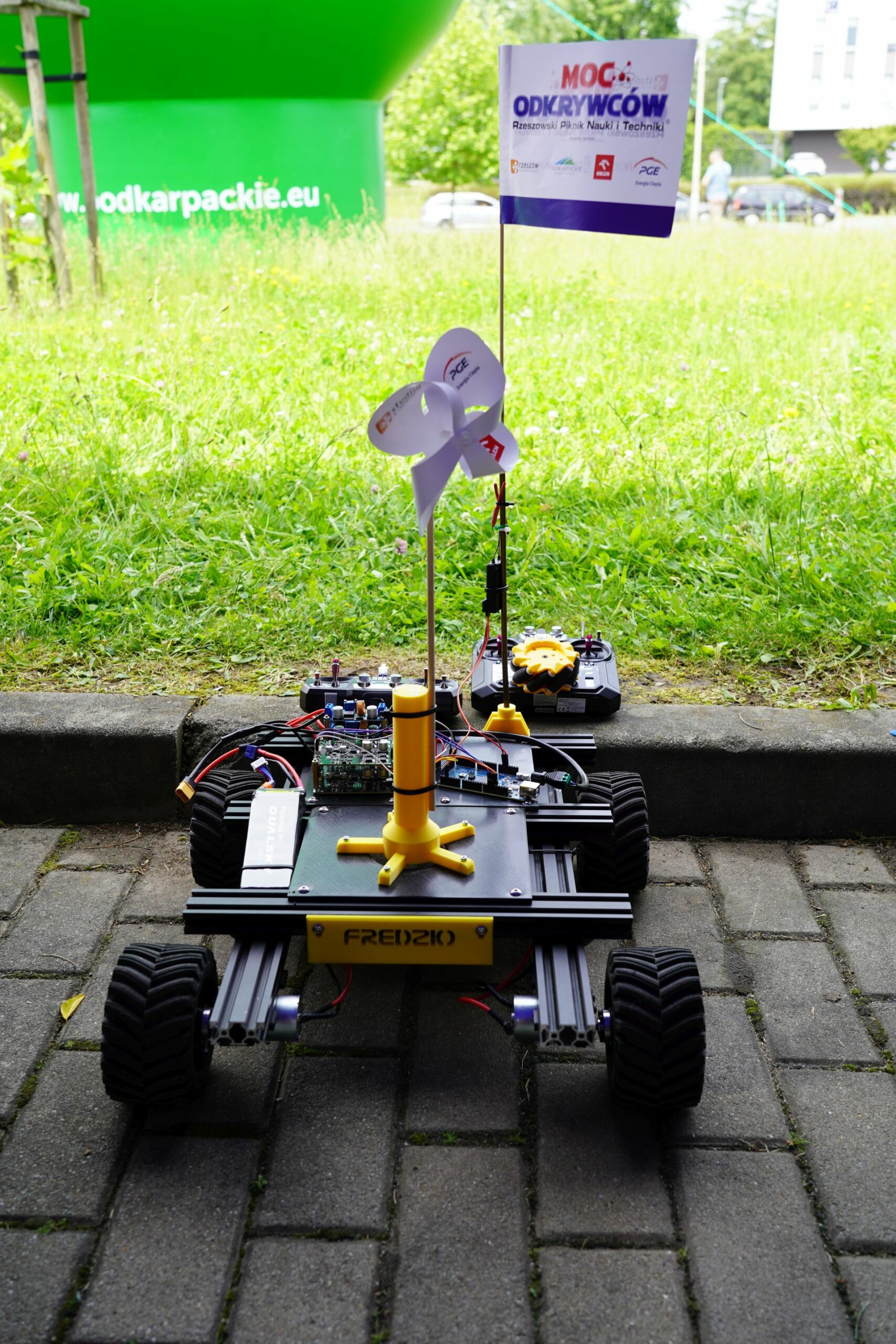
Nasza debiutancka konstrukcja — mobilny robot zdalnie sterowany zbudowany na bazie lekkich, ale wytrzymałych profili aluminiowych i napędzany czterema niezależnymi silnikami — miała swoją premierę podczas ogólnopolskich zawodów X-Challenge 2024 w kategorii Task Hunters. To prestiżowe wydarzenie przyciąga co roku dziesiątki zespołów z całego kraju, które rywalizują w projektowaniu i programowaniu autonomicznych oraz półautonomicznych maszyn wykonujących złożone zadania na specjalnie przygotowanej arenie.
Choć nasz robot powstawał w zawrotnym tempie, przy bardzo ograniczonym budżecie i w warunkach dalekich od idealnych, postanowiliśmy podjąć wyzwanie. Budowa była pełna niespodzianek – od drobnych zwarć w układzie elektrycznym, przez poważną awarię w dniu zawodów, aż po spektakularną wywrotkę podczas próbnego przejazdu i złamane ramię w trakcie jednej z konkurencji.
Mimo tych przeciwności nasza konstrukcja nie tylko wystartowała, ale również zajęła 10. miejsce w stawce kilkudziesięciu zespołów z całej Polski, co uważamy za ogromny sukces. Te zawody były dla nas nie tylko sprawdzianem umiejętności, ale też bezcenną lekcją współpracy, improwizacji i odporności na stres. Już teraz pracujemy nad kolejną, jeszcze lepszą wersją robota!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
RAGNAR
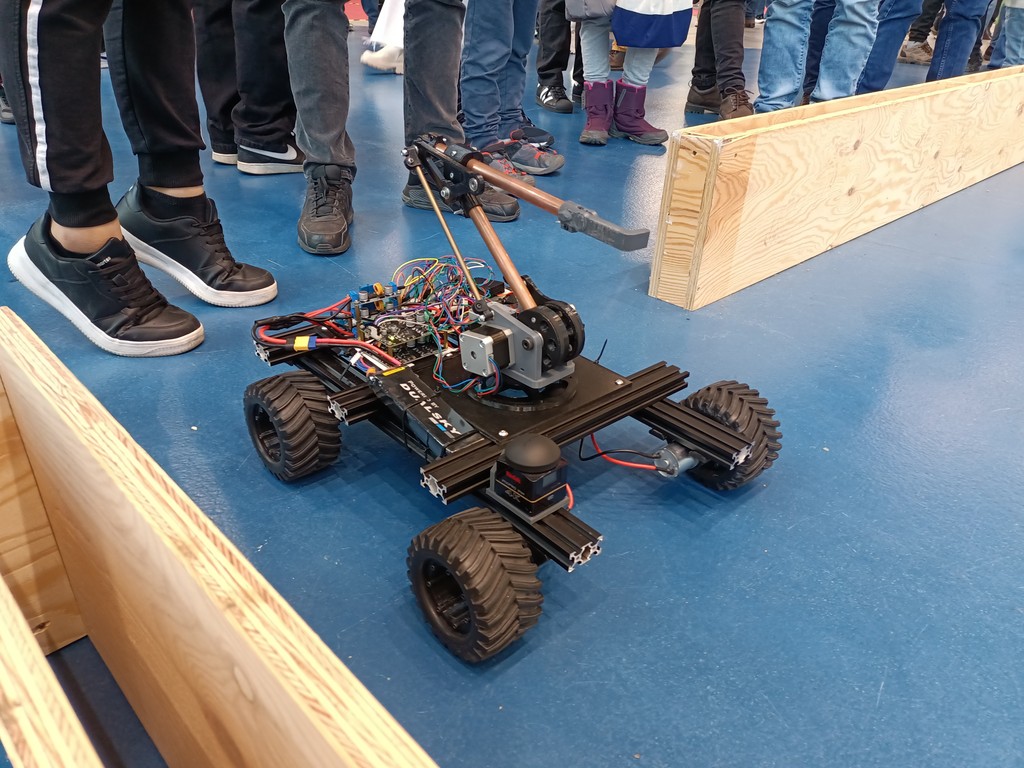
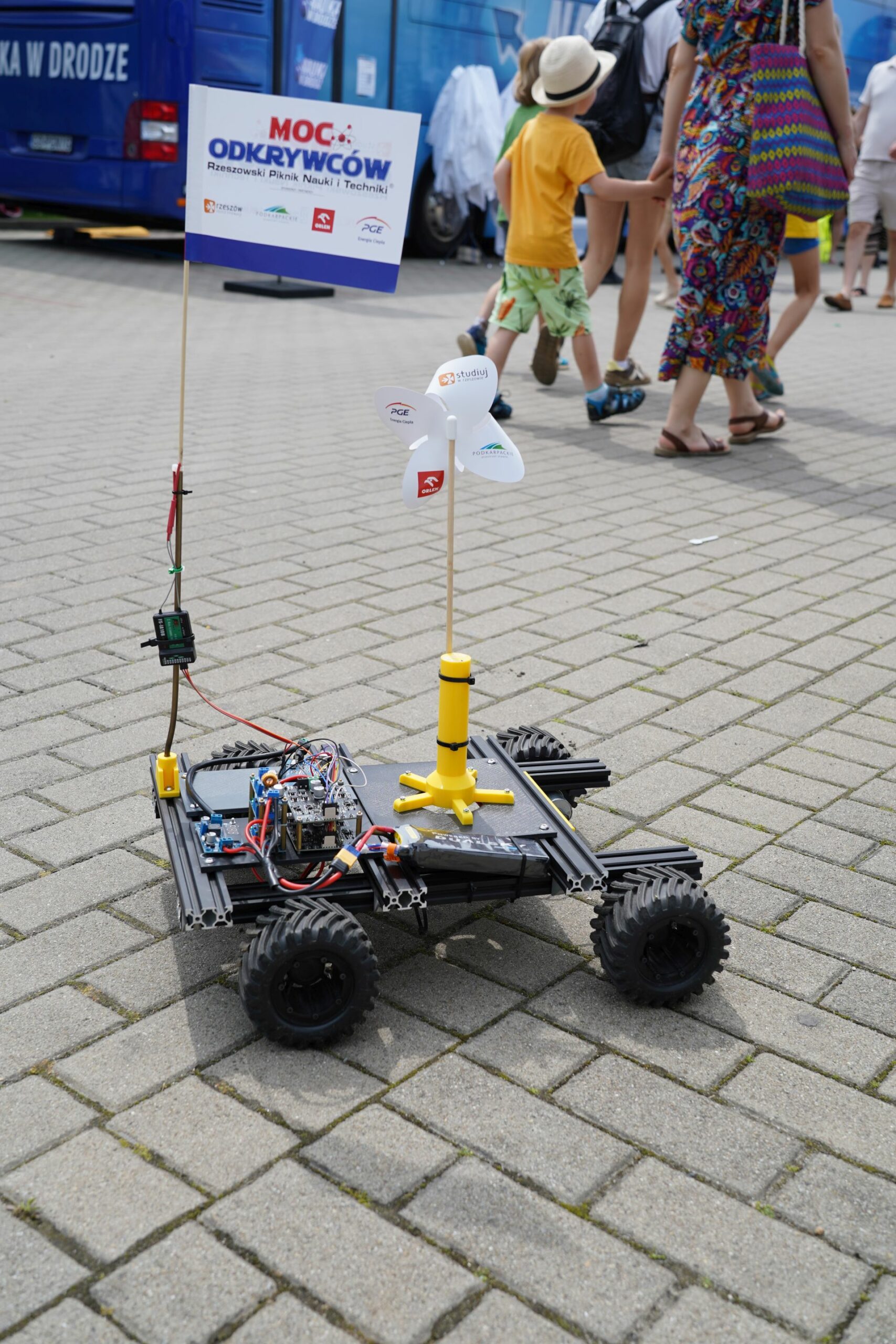
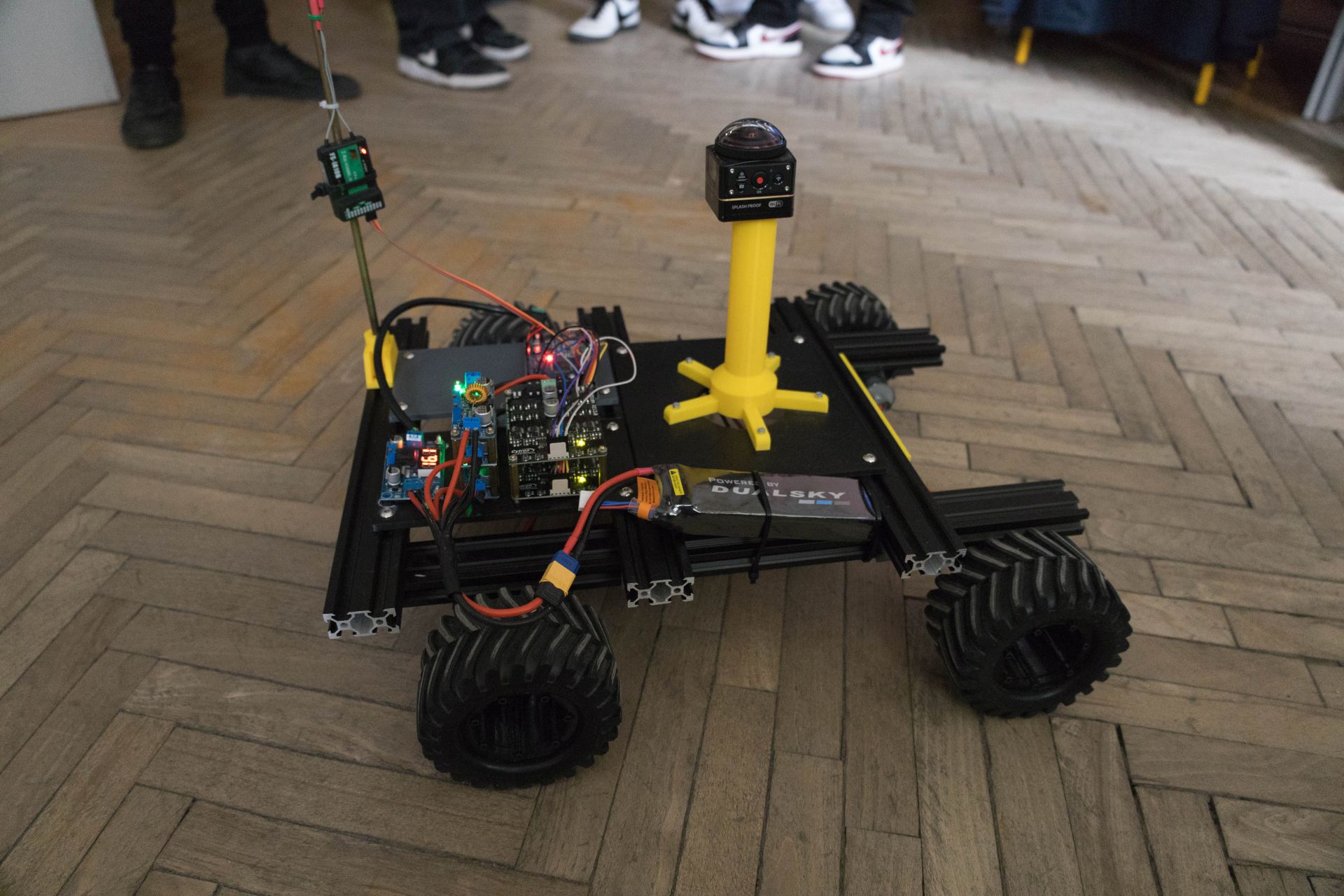
Ten wyjątkowy robot powstał dzięki współpracy z Podkarpackim Inkubatorem Innowacji (PCI), który nie tylko wsparł nas merytorycznie, ale również udzielił dofinansowania umożliwiającego realizację projektu. Był to dla nas ogromny krok naprzód – mogliśmy wreszcie przełożyć pomysły i prototypy na realną, w pełni funkcjonalną konstrukcję.
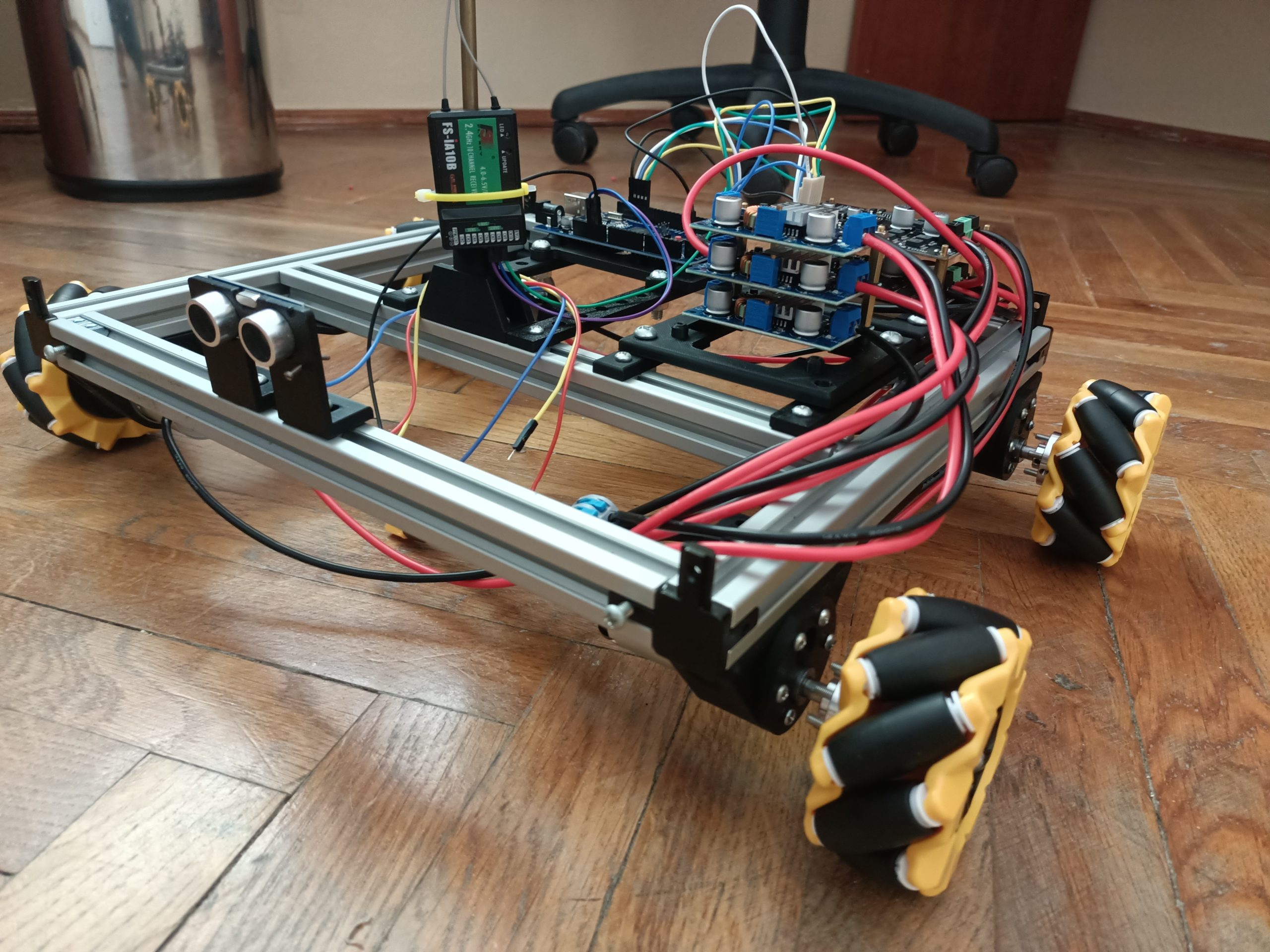
Pod względem budowy, robot bazuje na solidnym i lekkim szkielecie wykonanym z profili aluminiowych, co zapewnia zarówno wytrzymałość, jak i elastyczność w dalszej rozbudowie. Napędzany jest przez cztery niezależne silniki, z których każdy steruje osobnym kołem typu omniwheel – to właśnie one czynią tę konstrukcję wyjątkową.
Zastosowanie omniwheels umożliwia robotowi pełną swobodę ruchu: może poruszać się nie tylko klasycznie – do przodu i do tyłu – ale także w bok, po skosie, a nawet obracać się wokół własnej osi. Co więcej, dzięki odpowiedniemu algorytmowi sterowania możliwe jest przesunięcie osi obrotu robota poza jego fizyczną podstawę – nawet o 30 cm. To oznacza, że maszyna może np. precyzyjnie okrążać obiekt znajdujący się przed nią bez potrzeby zmiany orientacji całej konstrukcji.
Podobnie jak nasz wcześniejszy projekt – Fredzio – robot ten może być sterowany zdalnie, jednak tutaj poszliśmy o krok dalej. Dzięki zastosowaniu dodatkowych sensorów, możliwa jest również częściowa autonomia. Wyposażyliśmy go w ultradźwiękowy czujnik odległości oraz laserowy dalmierz, który pozwala wykrywać przeszkody nawet w promieniu do 12 metrów. W połączeniu z prostym, ale skutecznym algorytmem omijania przeszkód, robot potrafi samodzielnie analizować otoczenie i podejmować decyzje, np. o zmianie kierunku jazdy.
Oczywiście, jak to zwykle bywa w przypadku projektów inżynierskich, nie obyło się bez trudności. W trakcie testów musieliśmy mierzyć się m.in. z problemem pękających elementów mechanicznych – szczególnie tych łączących koła z wałami silników, które ulegały uszkodzeniom pod wpływem naprężeń dynamicznych. Dodatkowym wyzwaniem była integracja dalmierza laserowego z układami logicznymi robota, ponieważ wymagało to dopasowania napięć sygnałowych i zapewnienia stabilnej komunikacji między różnymi komponentami elektronicznymi.
Mimo napotkanych trudności, projekt ten był dla nas fascynującym doświadczeniem i kolejnym krokiem w stronę budowy bardziej zaawansowanych, mobilnych robotów. Dzięki wsparciu PCI mogliśmy nie tylko rozwinąć swoje umiejętności techniczne, ale także zrealizować koncepcję, która jeszcze niedawno istniała jedynie na papierze.
{kind=link}
{kind=link}
Robot Autonomiczny
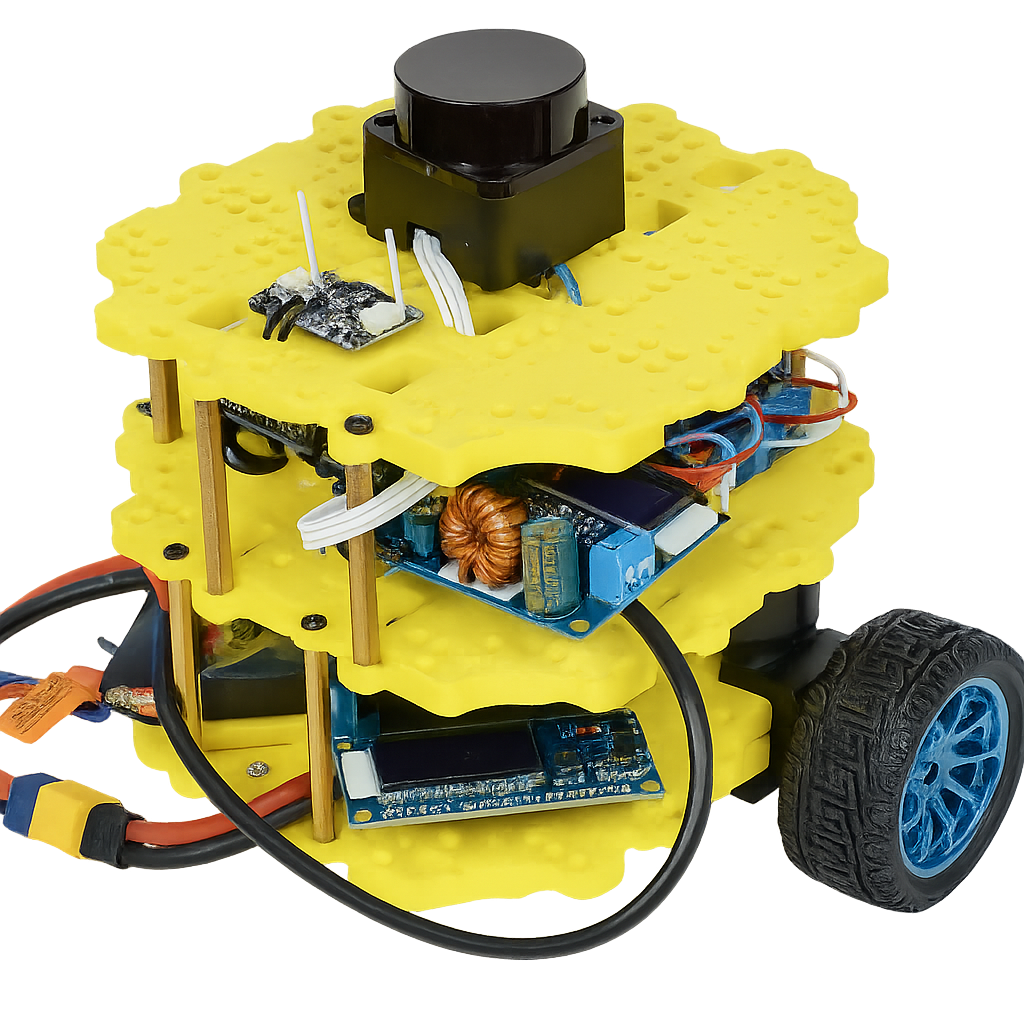
Choć na pierwszy rzut oka ten niewielki robot może przypominać dziecięcą zabawkę, jego wnętrze skrywa zaskakująco zaawansowaną technologię. To efekt naszej pracy w ramach konkursu „Naukolatek” oraz projektu badawczego „Zastosowanie sztucznej inteligencji w nawigacji robotów”, którego celem było stworzenie robota zdolnego do samodzielnego poruszania się w nieznanym środowisku przy wykorzystaniu nowoczesnych algorytmów lokalizacji i planowania trasy.
Pod tą niepozorną obudową znajduje się zestaw przemyślanych rozwiązań sprzętowych i programistycznych. Wyposażyliśmy robota m.in. w enkodery, czujnik położenia oraz LIDAR – system umożliwiający precyzyjne skanowanie otoczenia przy pomocy światła laserowego. Po stronie oprogramowania zdecydowaliśmy się na wykorzystanie ROS2 (Robot Operating System 2) – otwartoźródłowego frameworka powszechnie stosowanego w badaniach nad robotyką mobilną.
Dzięki połączeniu danych z LIDAR-u i enkoderów możliwe było wdrożenie technologii SLAM (Simultaneous Localization and Mapping), która pozwala robotowi jednocześnie mapować otoczenie i określać własną pozycję w przestrzeni. W efekcie robot jest w stanie autonomicznie poruszać się po nieznanym terenie, wykrywać i omijać przeszkody, a także planować trasę do zadanego punktu z użyciem algorytmu A*.
Oczywiście nie obyło się bez wyzwań. Jednym z trudniejszych etapów okazała się integracja LIDAR-u z systemem ROS2 — wymagała ona nie tylko prawidłowego doboru driverów, ale też kalibracji czujnika względem osi robota i synchronizacji danych z pozostałymi sensorami. Równie czasochłonna okazała się konfiguracja pakietu NAV2, odpowiadającego za nawigację. Musieliśmy dokładnie dobrać parametry lokalizacji, planowania ruchu i zarządzania mapą, aby robot zachowywał się stabilnie i przewidywalnie, niezależnie od warunków na torze.
Z racji ograniczonych zasobów obliczeniowych na samym robocie, część wymagających operacji – takich jak generowanie mapy, obliczanie trasy czy prowadzenie procesu lokalizacji – została przeniesiona na zewnętrzny komputer stacjonarny, który komunikował się z robotem przez sieć Wi-Fi. Dzięki architekturze ROS2 możliwa była bezproblemowa wymiana danych między urządzeniami w czasie rzeczywistym, co znacząco zwiększyło efektywność systemu.
Mimo że nie udało nam się zdobyć głównej nagrody w konkursie, zdobyta wiedza i doświadczenie były dla nas bezcenne. Poznaliśmy tajniki działania systemów autonomicznych, nauczyliśmy się integrować sprzęt z oprogramowaniem, a także zmierzyliśmy się z rzeczywistymi problemami, jakie napotyka się w pracy z nowoczesną robotyką. Z pewnością wrócimy do tego projektu – z nowymi pomysłami i jeszcze większym zapałem.
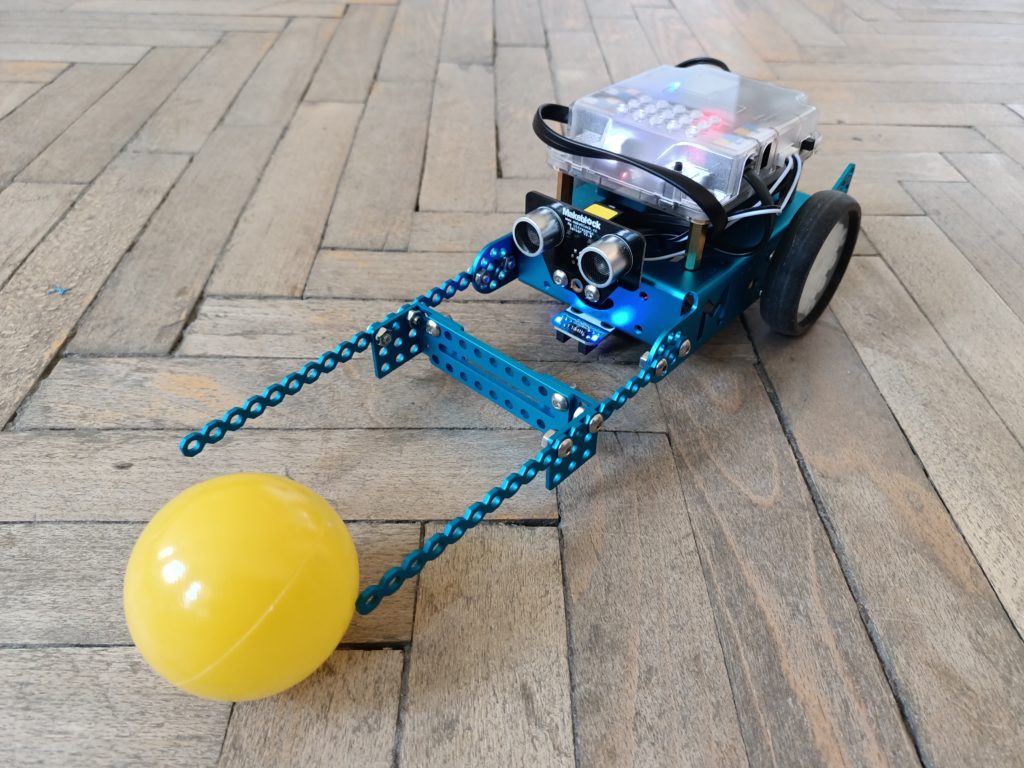
Roboty mBot - nasze roboty do nauki
W naszej pracowni, obok bardziej zaawansowanych konstrukcji, znalazły się także kompaktowe, ale niezwykle przydatne roboty mBot. To dzięki zaangażowaniu naszego opiekuna, dr. Stanisława Topolewicza, który uczestniczył w ogólnopolskim projekcie Centrum Mistrzostwa Informatycznego, szkoła otrzymała trzy takie urządzenia w ramach koła informatycznego. Choć z pozoru proste, mBoty stały się dla nas idealnym środowiskiem testowym.
Wykorzystujemy je jako platformę do nauki i eksperymentowania – to właśnie na nich testujemy nasze pierwsze algorytmy sterowania, uczymy się podstaw elektroniki i programowania. Symulujemy na nich różne scenariusze – od robotów sumo, przez pojazdy podążające za linią, aż po konstrukcje omijające przeszkody. Dzięki nim możemy bezpiecznie popełniać błędy, doskonalić pomysły i rozwijać umiejętności, zanim przeniesiemy je na nasze autorskie, bardziej skomplikowane roboty. To nasz pierwszy krok w stronę wielkich projektów.